#include <WiFi.h>
#include <WiFiClient.h>
#include <WebServer.h>
#include <U8g2lib.h>
#ifdef U8X8_HAVE_HW_SPI
#include <SPI.h>
#endif
#ifdef U8X8_HAVE_HW_I2C
#include <Wire.h>
#endif
U8G2_SSD1306_128X64_NONAME_1_SW_I2C u8g2(U8G2_R0, /* clock=*/ SCL, /* data=*/ SDA, /* reset=*/ U8X8_PIN_NONE); // All Boards without Reset of the Display
WebServer server ( 80 );
const char* ssid = "WLANNAME";
const char* password = "password";
void setup()
{
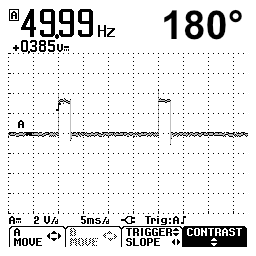
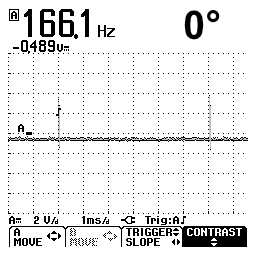
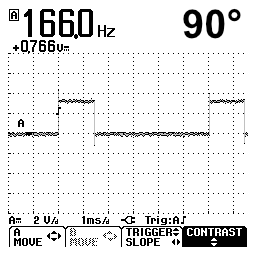
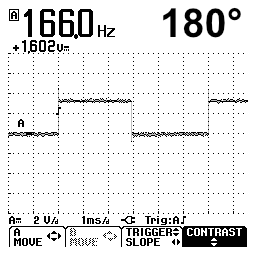
ledcSetup(1, 166, 8);
ledcAttachPin(13, 1); // GPIO 22 assigned to channel 1
Serial.begin(9600);
u8g2.begin();
u8g2.enableUTF8Print();
connectToWifi();
beginServer();
ledcWrite(1, 2);
u8g2.setFont(u8g2_font_courB18_tf);
u8g2.setFontDirection(0);
u8g2.firstPage();
do {
u8g2.drawStr(0, 20, "0 Grad");
} while ( u8g2.nextPage() );
}
void loop() {
server.handleClient();
delay(1000);
}
void connectToWifi()
{
WiFi.enableSTA(true);
delay(2000);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
Serial.println("IP address: ");
Serial.println(WiFi.localIP());
}
void beginServer()
{
server.on ( "/", handleRoot );
server.begin();
Serial.println ( "HTTP server started" );
}
void handleRoot() {
if ( server.hasArg("SERVO") ) {
handleSubmit();
} else {
server.send ( 200, "text/html", getPage() );
}
}
void handleSubmit() {
String SERVOValue;
SERVOValue = server.arg("SERVO");
Serial.println("Set GPIO ");
Serial.print(SERVOValue);
if ( SERVOValue == "0" ) {
ledcWrite(1, 2);
server.send ( 200, "text/html", getPage() );
u8g2.setFont(u8g2_font_courB18_tf);
u8g2.setFontDirection(0);
u8g2.firstPage();
do {
u8g2.drawStr(0, 20, "0 Grad");
} while ( u8g2.nextPage() );
}
else if ( SERVOValue == "90" )
{
ledcWrite(1, 60);
server.send ( 200, "text/html", getPage() );
u8g2.setFont(u8g2_font_courB18_tf);
u8g2.setFontDirection(0);
u8g2.firstPage();
do {
u8g2.drawStr(0, 20, "90 Grad");
} while ( u8g2.nextPage() );
}
else if ( SERVOValue == "180" )
{
ledcWrite(1, 125);
server.send ( 200, "text/html", getPage() );
u8g2.setFont(u8g2_font_courB18_tf);
u8g2.setFontDirection(0);
u8g2.firstPage();
do {
u8g2.drawStr(0, 20, "180 Grad");
} while ( u8g2.nextPage() );
} else
{
Serial.println("Error Servo Value");
}
}
String getPage() {
String page = "<html lang=en-EN><head><meta http-equiv='refresh' content='60'/>";
page += "<title>arduino-projekte.info</title>";
page += "<style></style>";
page += "</head><body><h1>ESP32 WebServer</h1>";
page += "<h3>Servo Test</h3>";
page += "<form action='/' method='POST'>";
//page += "<INPUT type='radio' name='SERVO' value='0'>0 Grad<br>";
// page += "<INPUT type='radio' name='SERVO' value='90'>90 Grad<br>";
// page += "<INPUT type='radio' name='SERVO' value='180'>180 Grad<br>";
page += "<INPUT class='button' type='submit' name='SERVO' value='0'>&nbsp;&nbsp;&nbsp;&nbsp;";
page += "<INPUT class='button' type='submit' name='SERVO' value='90'>&nbsp;&nbsp;&nbsp;&nbsp;";
page += "<INPUT class='button' type='submit' name='SERVO' value='180'>";
page += "</body></html>";
return page;
}